Abstract class that represents any solver interface and provides a low-lever mpc solver interface. More...
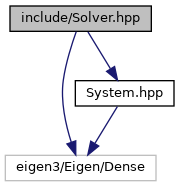
Include dependency graph for Solver.hpp:
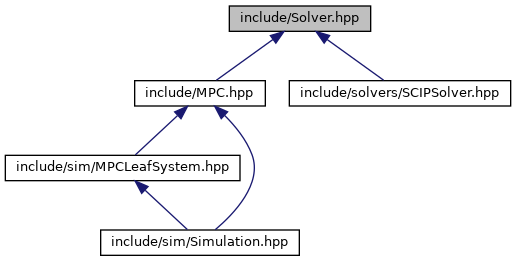
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mimpc::Solver< SystemType, N, min_steps_on, min_steps_off, max_steps_on, num_steps_solver_delay, integration_scheme > |
Enumerations | |
| enum | mimpc::SOLVER_RETURN { mimpc::OPTIMAL = 1 , mimpc::NO_SOLUTION = 0 , mimpc::TIME_LIMIT_WITH_SOLUTION = 2 , mimpc::USER_INTERRUPT = -10 } |
| enum | mimpc::COST_TYPE { mimpc::L1Linear = 0 , mimpc::L2Quadratic = 1 } |
| enum | mimpc::INTEGRATION_SCHEME { mimpc::FORWARD_EULER = 0 , mimpc::BACKWARD_EULER = 1 } |
Detailed Description
Abstract class that represents any solver interface and provides a low-lever mpc solver interface.
Enumeration Type Documentation
◆ COST_TYPE
| enum mimpc::COST_TYPE |
◆ INTEGRATION_SCHEME
◆ SOLVER_RETURN
| enum mimpc::SOLVER_RETURN |
Solver return code definitions
| Enumerator | |
|---|---|
| OPTIMAL | Optimal solution was found (within time solver limit) |
| NO_SOLUTION | No solution was found (within time solver limit) |
| TIME_LIMIT_WITH_SOLUTION | Suboptimal/feasible solution was found within time solver limit |
| USER_INTERRUPT | Solver was interrupted by user (i.e. by pressing CTRL+C while solver was running) |