The Physics of a Simple Pendulum
Equation of Motion
where
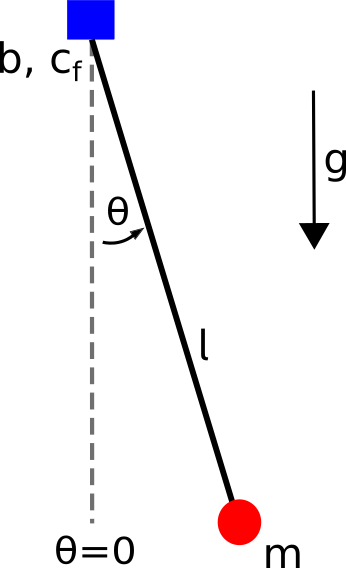
\(\theta\), \(\dot{\theta}\), \(\ddot{\theta}\) are the angular displacement, angular velocity and angular acceleration of the pendulum. \(\theta=0\) means the pendulum is at its stable fixpoint (i.e. hanging down).
\(I\) is the inertia of the pendulum. For a point mass: \(I=ml^2\)
\(m\) mass of the pendulum
\(l\) length of the pendulum
\(b\) damping friction coefficient
\(c_f\) coulomb friction coefficient
\(g\) gravity (positive direction points down)
\(\tau\) torque applied by the motor
The pendulum has two fixpoints, one of them being stable (the pendulum hanging down) and the other being unstable (the pendulum pointing upwards). A challenge from the control point of view is to swing the pendulum up to the unstable fixpoint and stabilize the pendulum in that state.
Energy of the Pendulum
Kinetic Energy (K)
\[K = \frac{1}{2}ml^2\dot{\theta}^2\]Potential Energy (U)
\[U = - mgl\cos(\theta)\]Total Energy (E)
\[E = K + U\]
PendulumPlant
The PendulumPlant class contains the kinematics and dynamics functions of the simple, torque limited pendulum.
The pendulum plant can be initialized as follows:
pendulum = PendulumPlant(mass=1.0,
length=0.5,
damping=0.1,
gravity=9.81,
coulomb_fric=0.02,
inertia=None,
torque_limit=2.0)
where the input parameters correspond to the parameters in the equaiton of motion (1). The input inertia=None is the default and the intertia is set to the inertia of a point mass at the end of the pendulum stick \(I=ml^2\). Additionally, a torque_limit can be passed to the class. Torques greater than the torque_limit or smaller than -torque_limit will be cut off.
The plant can now be used to calculate the forward kinematics with:
[[x,y]] = pendulum.forward_kinematics(pos)
where pos is the angle \(\theta\) of interest. This function returns the (x,y) coordinates of the tip of the pendulum inside a list. The return is a list of all link coordinates of the system (as the pendulum has only one, this returns [[x,y]]).
Similarily, inverse kinematics can be computed with:
pos = pendulum.inverse_kinematics(ee_pos)
where ee_pos is a list of the end_effector coordinates [x,y]. pendulum.inverse_kinematics returns the angle of the system as a float.
Forward dynamics can be calculated with:
accn = pendulum.forward_dynamics(state, tau)
where state is the state of the pendulum [\(\theta, \dot{theta}\)] and tau the motor torque as a float. The function returns the angular acceleration.
For inverse kinematics:
tau = pendulum.inverse_kinematics(state, accn)
where again state is the state of the pendulum [\(\theta, \dot{theta}\)] and accn the acceleration. The function return the motor torque \(\tau\) that would be neccessary to produce the desired acceleration at the specified state.
Finally, the function:
res = pendulum.rhs(t, state, tau)
returns the integrand of the equaitons of motion, i.e. the object that can be calculated with a time step to obtain the forward evolution of the system. The API of the function is written to match the API requested inside the simulator class. t is the time which is not used in the pendulum dynamics (the dynamics do not change with time). state again is the pendulum state and tau the motor torque. res is a numpy array with shape np.shape(res)=(2,) and res = [\(\dot{\theta}, \ddot{theta}\)].
Usage
The class is inteded to be used inside the simulator class.
Parameter Identification
The rigid-body model derived from a-priori known geometry as described previously has the form
where actuation torques \(\tau\), joint positions \(\theta(t)\), velocities \(\dot{\theta}(t)\) and accelerations \(\ddot{\theta}(t)\) depend on time t and \(\lambda\in\mathbb{R}^{6n}\) denotes the parameter vector. Two additional parameters for Coulomb and viscous friction are added to the model, \(F_{c,i}\) and F_{v,i}, in order to take joint friction into account. The required torques for model-based control can be measured using stiff position control and closely tracking the reference trajectory. A sufficiently rich, periodic, band-limited excitation trajectory is obtained by modifying the parameters of a Fourier-Series as described by [^fn3]. The dynamic parameters \(\hat{\lambda}\) are estimated through least squares optimization between measured torque and computed torque
where \(\mathit{\Phi}\) denotes the identification matrix.
References
Bruno Siciliano et al. Robotics. Red. by Michael J. Grimble and Michael A. Johnson. Advanced Textbooks in Control and Signal Processing. London: Springer London, 2009. ISBN: 978-1-84628-641-4 978-1-84628-642-1. DOI: 10.1007/978-1-84628-642-1 (visited on 09/27/2021).
Vinzenz Bargsten, José de Gea Fernández, and Yohannes Kassahun. Experimental Robot Inverse Dynamics Identification Using Classical and Machine Learning Techniques. In: ed. by International Symposium on Robotics. OCLC: 953281127. 2016. (visited on 09/27/2021).
Jan Swevers, Walter Verdonck, and Joris De Schutter. Dynamic ModelIdentification for Industrial Robots. In: IEEE Control Systems27.5 (Oct.2007), pp. 58–71. ISSN: 1066-033X, 1941-000X.doi:10.1109/MCS.2007.904659 (visited on 09/27/2021).